מתנע רך הוא התקן בקרת מנוע המשלב הפעלה רכה, עצירה רכה, חיסכון באנרגיה בעומס קל ופונקציות הגנה מרובות. הוא מורכב בעיקר מתיריסטורים תלת פאזיים אנטי-מקביליים המחוברים בטור בין ספק הכוח למנוע הנשלט ומעגל הבקרה האלקטרוני שלו. שיטות שונות משמשות לשליטה בזווית ההולכה של תיריסטורים תלת פאזיים אנטי-מקביליים, כך שמתח הכניסה של המנוע הנשלט משתנה בהתאם לדרישות שונות.
1. מאמץ את בקרת המיקרו-מעבד הדיגיטלית האוטומטית, בעל ביצועים אלקטרומגנטיים מעולים. התחלה רכה, עצירה רכה או עצירה חופשית.
2. ניתן לאמץ את מתח ההתנעה, הזרם, זמן ההתנעה הרכה והעצירה הרכה בהתאם לעומסים שונים כדי להפחית את זעזוע זרם ההתנעה. ביצועים יציבים, הפעלה קלה, תצוגה ישירה, נפח קטן, סט דיגיטלי, כולל פונקציות שלט רחוק ובקרה חיצונית.
3. יש הגנה מפני אובדן פאזה, מתח יתר, עומס יתר, זרם יתר, התחממות יתר.
4. בעל פונקציות של תצוגת מתח כניסה, תצוגת זרם פעולה, בדיקה עצמית של תקלות, זיכרון תקלות. בעל פלט ערך סימולציה של 0-20mA, יכול לממש ניטור זרם מנוע.
למנוע אינדוקציה AC יתרונות של עלות נמוכה, אמינות גבוהה ותחזוקה נדירה.
חסרונות:
1. זרם ההתחלה גבוה פי 5-7 מהזרם המדורג. וזה דורש שזרם החשמל יהיה בעל מרווח גדול, וזה גם יקטין את חיי העבודה של התקן הבקרה החשמלי, וישפר את עלות התחזוקה.
2. מומנט ההתנעה הוא כפול ממומנט ההתנעה הרגיל, מה שגורם לזעזוע עומס ונזק לרכיבי ההינע. המתנע הרך RDJR6 מאמץ מודול תייסטור נשלט וטכנולוגיית הזזת פאזה כדי לשפר את מתח המנוע באופן קבוע. והוא יכול לממש את דרישות מומנט המנוע, הזרם והעומס באמצעות פרמטר בקרה. המתנע הרך מסדרת RDJR6 מאמץ מיקרו-מעבד כדי לשלוט ולממש את פונקציות ההתנעה הרכה והעצירה הרכה של מנוע אסינכרוני AC, בעל פונקציית הגנה מלאה, והוא נמצא בשימוש נרחב בציוד הנעת מנועים בתחומי המתכת, הנפט, המכרות והתעשייה הכימית.
מפרט ייצור
| מספר דגם | הספק מדורג (קילוואט) | זרם מדורג (A) | הספק מנוע אפליטיבי (קילוואט) | גודל צורה (מ"מ) | משקל (ק"ג) | פֶּתֶק | |||||
| A | B | C | D | E | d | ||||||
| RDJR6-5.5 | 5.5 | 11 | 5.5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | איור 2.1 |
| RDJR6-7.5 | 7.5 | 15 | 7.5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18.5 | 37 | 18.5 | ||||||||
| RDJR6-22 | 22 | 44 | 22 | ||||||||
| RDJR6-30 | 30 | 60 | 30 | ||||||||
| RDJR6-37 | 37 | 74 | 37 | ||||||||
| RDJR6-45 | 45 | 90 | 45 | ||||||||
| RDJR6-55 | 55 | 110 | 55 | ||||||||
| RDJR6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | איור 2.2 |
| RDJR6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| RDJR6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| RDJR6-200 | 200 | 400 | 200 | ||||||||
| RDJR6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | איור 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
תַרשִׁים
פרמטר פונקציונלי
| קוד | שם הפונקציה | טווח הגדרה | בְּרִירַת מֶחדָל | הוֹרָאָה | |||||||
| P0 | מתח התחלתי | (30-70) | 30 | PB1=1, מודל שיפוע המתח יעיל; כאשר הגדרת PB היא במצב זרם, ערך ברירת המחדל ההתחלתי של המתח הוא 40%. | |||||||
| P1 | זמן התחלה רכה | (2-60) שניות | שנות ה-16 | PB1=1, מודל שיפוע המתח יעיל | |||||||
| P2 | זמן עצירה רכה | (0-60) שניות | 0s | הגדרה=0, לעצירה חופשית. | |||||||
| P3 | זמן התוכנית | (0-999) שניות | 0s | לאחר קבלת פקודות, שימוש בסוג ספירה לאחור כדי לעכב את ההתחלה לאחר הגדרת ערך P3. | |||||||
| P4 | עיכוב התחלה | (0-999) שניות | 0s | עיכוב פעולת ממסר ניתן לתכנות | |||||||
| P5 | עיכוב תוכנית | (0-999) שניות | 0s | לאחר הסרת התחממות יתר ועיכוב הגדרת P5, הוא היה במצב מוכן | |||||||
| P6 | עיכוב מרווח | (50-500)% | 400% | קשור להגדרת PB, כאשר הגדרת PB היא 0, ברירת המחדל היא 280%, והתיקון תקף. כאשר הגדרת PB היא 1, ערך המגבלה הוא 400%. | |||||||
| P7 | זרם התחלה מוגבל | (50-200)% | 100% | משמש לכוונון ערך הגנת עומס יתר של המנוע, סוג הקלט P6, P7 תלוי ב-P8. | |||||||
| P8 | זרם תפעולי מקסימלי | 0-3 | 1 | השתמש כדי להגדיר ערך נוכחי או אחוזים | |||||||
| P9 | מצב התצוגה הנוכחי | (40-90)% | 80% | נמוך מערך ההגדרה, תצוגת הכשל היא "Err09" | |||||||
| PA | הגנה מפני תת-מתח | (100-140)% | 120% | גבוה יותר מערך ההגדרה, תצוגת הכשל היא "Err10" | |||||||
| PB | שיטת התחלה | 0-5 | 1 | 0 מוגבל זרם, 1 מתח, 2 מוגבל זרם בעיטה, 3 מוגבל זרם בעיטה, 4 שיפוע זרם, 5 סוג לולאה כפולה | |||||||
| PC | הגנת פלט מאפשרת | 0-4 | 4 | 0 ראשוני, 1 עומס מינימלי, 2 סטנדרטי, 3 עומס כבד, 4 בכיר | |||||||
| PD | מצב בקרה תפעולי | 0-7 | 1 | השתמש ב- לבחירת הגדרות לוח בקרה חיצוני. 0, להפעלת לוח בקרה בלבד, 1 להפעלת לוח בקרה חיצוני וגם להפעלת מסוף בקרה חיצוני. | |||||||
| PE | אפשרות אתחול אוטומטי | 0-13 | 0 | 0: אסור, 1-9 לזמני איפוס אוטומטי | |||||||
| PF | תיקון פרמטרים מאפשר | 0-2 | 1 | 0: אסור, 1 עבור נתונים חלקיים מתוקנים המותרים, 2 עבור כל הנתונים המתוקנים המותרים | |||||||
| PH | כתובת תקשורת | 0-63 | 0 | שימוש לתקשורת של מתנע רך מרובה והתקן עליון | |||||||
| PJ | פלט התוכנית | 0-19 | 7 | השתמש כדי לתכנת את הגדרת פלט הממסר (3-4). | |||||||
| PL | זרם עצירה רך מוגבל | (20-100)% | 80% | השתמש בהגדרה מוגבלת זרם של עצירה רכה P2 | |||||||
| PP | זרם מנוע מדורג | (11-1200)א | ערך מדורג | משמש להזנת זרם נומינלי של המנוע | |||||||
| PU | הגנה מפני תת-מתח מנוע | (10-90)% | לֶאֱסוֹר | משמש להגדרת פונקציות הגנה מפני תת-מתח מנוע. | |||||||
הוראת כשל
| קוד | הוֹרָאָה | בעיה ופתרון | |||||||||
| שגיאה00 | אין כישלון | תקלה של תת-מתח, מתח יתר, התחממות יתר או עצירה חולפת פתוחה במסוף תוקנה. ומחוון הלוח נדלק, לחץ על כפתור "עצור" כדי לאפס, ולאחר מכן מפעיל את המנוע. | |||||||||
| שגיאה01 | מסוף עצירה זמני חיצוני פתוח | בדוק אם יש קצר חשמלי במסוף 7 של הטרמינל המעבר החיצוני 7 והמסוף המשותף 10 או אם מגע NC של התקני הגנה אחרים תקין. | |||||||||
| שגיאה02 | התחממות יתר של מתנע רך | טמפרטורת הרדיאטור עולה על 85 מעלות צלזיוס, הגנה מפני התחממות יתר, מתנע רך מפעיל את המנוע לעתים קרובות מדי או שהספק המנוע אינו רלוונטי למתנע רך. | |||||||||
| שגיאה03 | התחלת הארכה | נתוני הגדרת ההתחלה אינם רלוונטיים או שהעומס כבד מדי, קיבולת החשמל קטנה מדי | |||||||||
| שגיאה04 | אובדן פאזה בקלט | בדוק אם יש תקלה בלולאה הראשית או בקלט, או אם מגען העוקף יכול להישבר וליצור מעגל תקין, או אם בקרת הסיליקון פתוחה | |||||||||
| שגיאה05 | אובדן פאזה ביציאה | בדוק אם יש תקלה בלולאה הקלט או בלולאה הראשית, או אם המגען המעקף יכול להישבר וליצור מעגל תקין, או אם בקרת הסיליקון פתוחה, או אם יש תקלות בחיבור המנוע. | |||||||||
| שגיאה06 | תלת פאזי לא מאוזן | בדוק אם יש שגיאות בקלט החשמל התלת-פאזי ובמנוע, או אם שנאי הזרם נותן אותות. | |||||||||
| שגיאה07 | זרם יתר מתחיל | אם העומס כבד מדי או שניתן להשתמש בהספק המנוע באמצעות מתנע רך, או הגדרת ערך PC (הגנת פלט מותרת). | |||||||||
| שגיאה08 | הגנה על עומס יתר תפעולי | אם העומס כבד מדי או P7, הגדרת PP משתבשת. | |||||||||
| שגיאה09 | תת-מתח | בדוק אם מתח קלט או תאריך הגדרת P9 הם שגיאות | |||||||||
| שגיאה 10 | מתח יתר | בדוק אם מתח קלט או תאריך הגדרת PA שגויים | |||||||||
| שגיאה11 | שגיאת נתוני הגדרת | תקן את ההגדרה או לחץ על כפתור "Enter" כדי להתחיל באיפוס | |||||||||
| שגיאה12 | קצר חשמלי של עומס | בדוק אם יש קצר חשמלי בסיליקון, או שהעומס כבד מדי, או שסליל המנוע יש קצר חשמלי. | |||||||||
| שגיאה13 | שגיאת חיבור מחדש | בדוק אם טרמינל ההתנעה החיצוני 9 והטרמינל העצירה 8 מחוברים בהתאם לסוג דו-קו. | |||||||||
| שגיאה14 | שגיאת חיבור מסוף עצירה חיצוני | כאשר הגדרת PD היא 1, 2, 3, 4 (מאפשרת בקרה חיצונית), טרמינל עצירה חיצוני 8 והטרמינל משותף 10 אינם קצרים. רק אם הם קצרים, ניתן להפעיל את המנוע. | |||||||||
| שגיאה15 | עומס יתר על המנוע | בדוק את שגיאת המנוע והעומס. | |||||||||
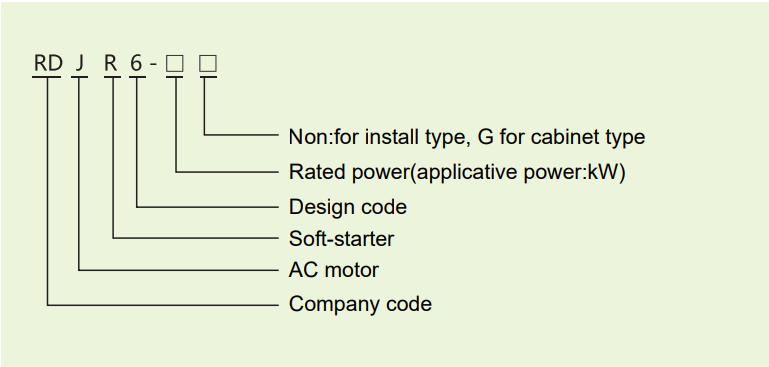
מספר דגם
מסוף בקרה חיצוני

הגדרת מסוף בקרה חיצוני
| ערך החלפה | קוד הטרמינל | פונקציית טרמינל | הוֹרָאָה | |||||||
| פלט ממסר | 1 | פלט מעקף | מגען מעקף בקרה, כאשר המתנע הרך מתחיל בהצלחה, אין מגע ללא אספקת חשמל, קיבולת: AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | פלט ממסר ניתן לתכנות | סוג הפלט והפונקציות נקבעים על ידי P4 ו-PJ, אין מגע ללא ספק כוח, קיבולת: AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | פלט ממסר כשל | כאשר מתנע רך מתקלקל, ממסר זה סגור, אין מגע ללא אספקת חשמל, קיבולת: AC250V/5A | ||||||||
| 6 | ||||||||||
| קֶלֶט | 7 | עצירה חולפת | כאשר המתנע הרך מתחיל כרגיל, יש לקצר את ההדק הזה עם ההדק 10. | |||||||
| 8 | עצירה/איפוס | מתחבר עם טרמינל 10 כדי לשלוט ב-2 קווים, 3 קווים, לפי שיטת החיבור. | ||||||||
| 9 | הַתחָלָה | |||||||||
| 10 | מסוף משותף | |||||||||
| פלט אנלוגי | 11 | נקודה משותפת של סימולציה (-) | זרם יציאה של 4 פעמים הזרם המדורג הוא 20mA, ניתן לזהות אותו גם על ידי מד DC חיצוני, התנגדות עומס מקסימלית היא 300. | |||||||
| 12 | פלט זרם סימולציה (+) | |||||||||
לוח תצוגה

| מַד | הוֹרָאָה | ||||||||
| מוּכָן | כאשר המכשיר דולק ומצב מוכן, מחוון זה דולק | ||||||||
| לַעֲבוֹר | כאשר מעקף פועל, מחוון זה דולק | ||||||||
| שְׁגִיאָה | כאשר מתרחשת כשל, מחוון זה דולק | ||||||||
| A | נתוני ההגדרה הם הערך הנוכחי, מחוון זה דולק | ||||||||
| % | נתוני ההגדרה הם האחוז הנוכחי, מחוון זה דולק | ||||||||
| s | נתוני הגדרת זמן, מחוון זה דולק | ||||||||
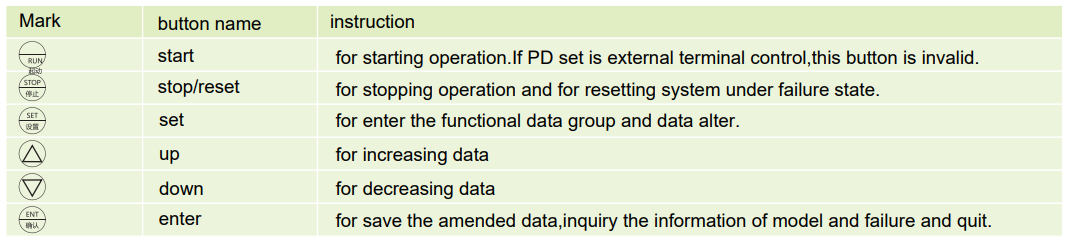
הוראת מחוון מצב
הוראות כפתור
למתחר הרך סדרת RDJR6 יש 5 סוגים של מצבי פעולה: מוכן, פעולה, תקלה, התחלה ועצירה, מוכן, פעולה, תקלה
יש אות מחוון יחסי. הוראות ראו טבלה לעיל.
בתהליכי התחלה רכה ועצירה רכה, לא ניתן להגדיר נתונים, רק אם הם נמצאים במצב אחר.
במצב הגדרה, מצב ההגדרה יפסיק את מצב ההגדרה ללא כל פעולה לאחר 2 דקות.
תחילה לחצו על כפתור "Enter", לאחר מכן טענו והפעילו את המתנע. לאחר האזנה לצליל ההתראה, ניתן לאפס את
ערך המפעל של נתונים בחזרה.
מראה ומידות הרכבה
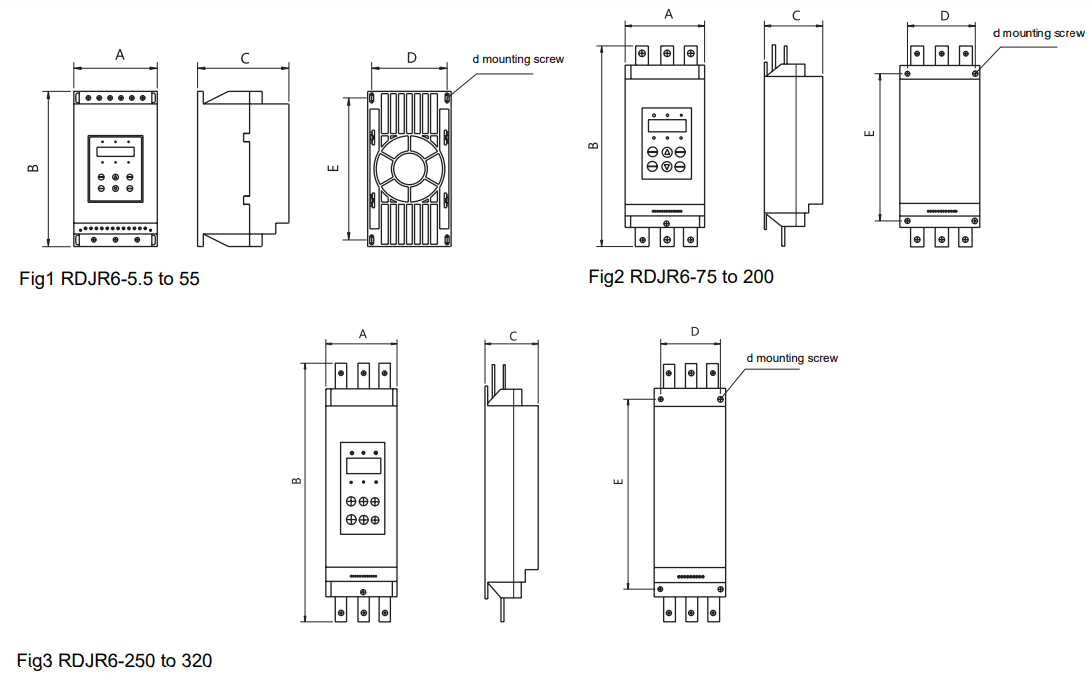
תרשים יישום
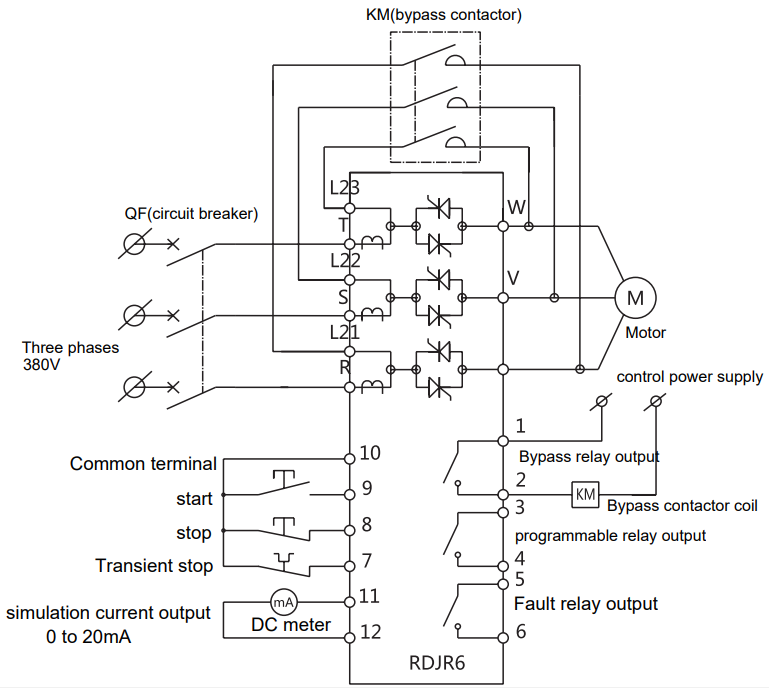
דיאגרמת בקרה רגילה
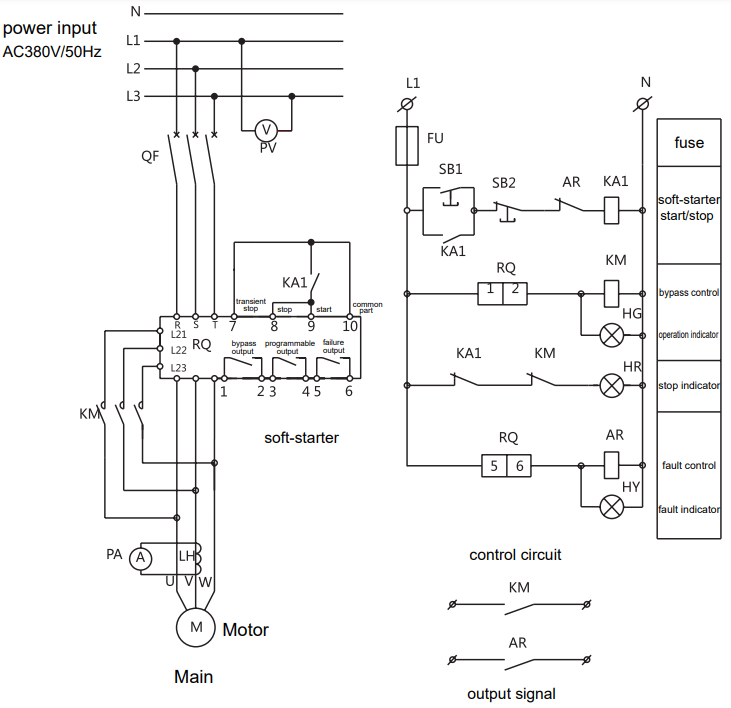
הוֹרָאָה:
1. מסוף חיצוני מאמץ שני קווי בקרת סוג. כאשר KA1 סגור להפעלה, פתוח לעצירה.
2. מתנע רך אשר מעל 75 קילוואט צריך לשלוט בסליל המגעון המעקף באמצעות ממסר אמצעי, בגלל קיבולת הנעה מוגבלת של מגע הממסר הפנימי של המתנע הרך.
12.2 דיאגרמת בקרה משותפת אחת ודיאגרמת בקרה המתנה אחת
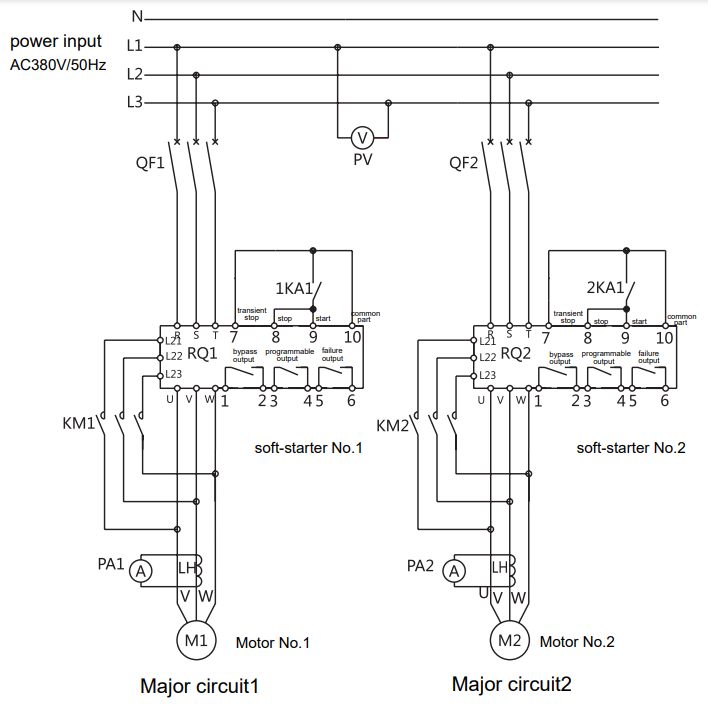
12.3 דיאגרמת בקרה משותפת אחת ודיאגרמת בקרה המתנה אחת
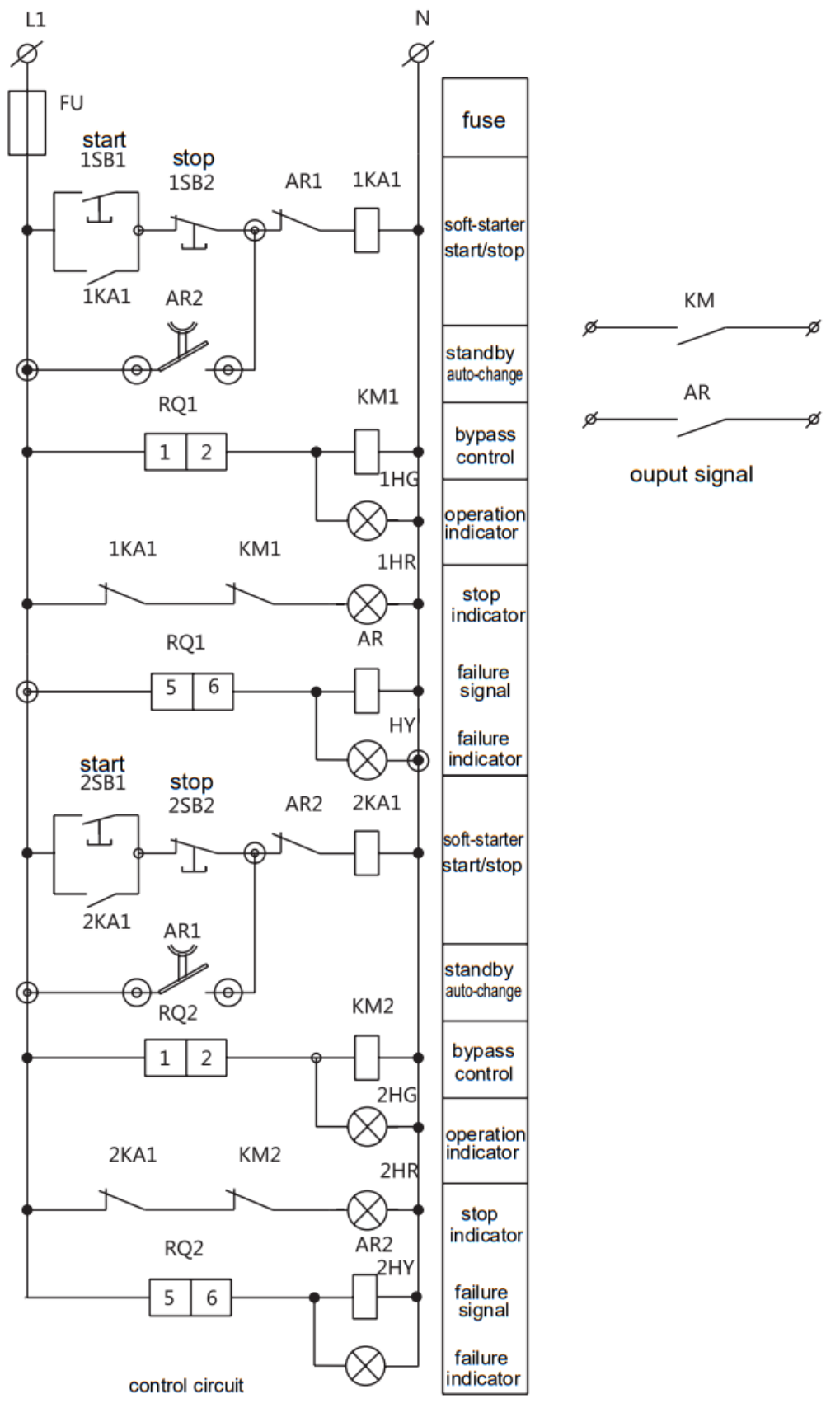
הוֹרָאָה:
1. בתרשים, מסוף חיצוני מאמץ סוג דו-קוי
(כאשר 1KA1 או 2KA1 סגורים, הם מתחילים לפעול. כאשר הם נשברים, הם מפסיקים לפעול.)
2. מתנע רך מעל 75 קילוואט צריך לשלוט בסליל המגעון מעקף באמצעות ממסר אמצעי בגלל קיבולת הנעה מוגבלת של מגע הממסר האמצעי הפנימי של המתנע הרך.
למנוע אינדוקציה AC יתרונות של עלות נמוכה, אמינות גבוהה ותחזוקה נדירה.
חסרונות:
1. זרם ההתחלה גבוה פי 5-7 מהזרם המדורג. וזה דורש שזרם החשמל יהיה בעל מרווח גדול, וזה גם יקטין את חיי העבודה של התקן הבקרה החשמלי, וישפר את עלות התחזוקה.
2. מומנט ההתנעה הוא כפול ממומנט ההתנעה הרגיל, מה שגורם לזעזוע עומס ונזק לרכיבי ההינע. המתנע הרך RDJR6 מאמץ מודול תייסטור נשלט וטכנולוגיית הזזת פאזה כדי לשפר את מתח המנוע באופן קבוע. והוא יכול לממש את דרישות מומנט המנוע, הזרם והעומס באמצעות פרמטר בקרה. המתנע הרך מסדרת RDJR6 מאמץ מיקרו-מעבד כדי לשלוט ולממש את פונקציות ההתנעה הרכה והעצירה הרכה של מנוע אסינכרוני AC, בעל פונקציית הגנה מלאה, והוא נמצא בשימוש נרחב בציוד הנעת מנועים בתחומי המתכת, הנפט, המכרות והתעשייה הכימית.
מפרט ייצור
| מספר דגם | הספק מדורג (קילוואט) | זרם מדורג (A) | הספק מנוע אפליטיבי (קילוואט) | גודל צורה (מ"מ) | משקל (ק"ג) | פֶּתֶק | |||||
| A | B | C | D | E | d | ||||||
| RDJR6-5.5 | 5.5 | 11 | 5.5 | 145 | 278 | 165 | 132 | 250 | M6 | 3.7 | איור 2.1 |
| RDJR6-7.5 | 7.5 | 15 | 7.5 | ||||||||
| RDJR6-11 | 11 | 22 | 11 | ||||||||
| RDJR6-15 | 15 | 30 | 15 | ||||||||
| RDJR6-18.5 | 18.5 | 37 | 18.5 | ||||||||
| RDJR6-22 | 22 | 44 | 22 | ||||||||
| RDJR6-30 | 30 | 60 | 30 | ||||||||
| RDJR6-37 | 37 | 74 | 37 | ||||||||
| RDJR6-45 | 45 | 90 | 45 | ||||||||
| RDJR6-55 | 55 | 110 | 55 | ||||||||
| RDJR6-75 | 75 | 150 | 75 | 260 | 530 | 205 | 196 | 380 | M8 | 18 | איור 2.2 |
| RDJR6-90 | 90 | 180 | 90 | ||||||||
| RDJR6-115 | 115 | 230 | 115 | ||||||||
| RDJR6-132 | 132 | 264 | 132 | ||||||||
| RDJR6-160 | 160 | 320 | 160 | ||||||||
| RDJR6-185 | 185 | 370 | 185 | ||||||||
| RDJR6-200 | 200 | 400 | 200 | ||||||||
| RDJR6-250 | 250 | 500 | 250 | 290 | 570 | 260 | 260 | 470 | M8 | 25 | איור 2.3 |
| RDJR6-280 | 280 | 560 | 280 | ||||||||
| RDJR6-320 | 320 | 640 | 320 | ||||||||
תַרשִׁים
פרמטר פונקציונלי
| קוד | שם הפונקציה | טווח הגדרה | בְּרִירַת מֶחדָל | הוֹרָאָה | |||||||
| P0 | מתח התחלתי | (30-70) | 30 | PB1=1, מודל שיפוע המתח יעיל; כאשר הגדרת PB היא במצב זרם, ערך ברירת המחדל ההתחלתי של המתח הוא 40%. | |||||||
| P1 | זמן התחלה רכה | (2-60) שניות | שנות ה-16 | PB1=1, מודל שיפוע המתח יעיל | |||||||
| P2 | זמן עצירה רכה | (0-60) שניות | 0s | הגדרה=0, לעצירה חופשית. | |||||||
| P3 | זמן התוכנית | (0-999) שניות | 0s | לאחר קבלת פקודות, שימוש בסוג ספירה לאחור כדי לעכב את ההתחלה לאחר הגדרת ערך P3. | |||||||
| P4 | עיכוב התחלה | (0-999) שניות | 0s | עיכוב פעולת ממסר ניתן לתכנות | |||||||
| P5 | עיכוב תוכנית | (0-999) שניות | 0s | לאחר הסרת התחממות יתר ועיכוב הגדרת P5, הוא היה במצב מוכן | |||||||
| P6 | עיכוב מרווח | (50-500)% | 400% | קשור להגדרת PB, כאשר הגדרת PB היא 0, ברירת המחדל היא 280%, והתיקון תקף. כאשר הגדרת PB היא 1, ערך המגבלה הוא 400%. | |||||||
| P7 | זרם התחלה מוגבל | (50-200)% | 100% | משמש לכוונון ערך הגנת עומס יתר של המנוע, סוג הקלט P6, P7 תלוי ב-P8. | |||||||
| P8 | זרם תפעולי מקסימלי | 0-3 | 1 | השתמש כדי להגדיר ערך נוכחי או אחוזים | |||||||
| P9 | מצב התצוגה הנוכחי | (40-90)% | 80% | נמוך מערך ההגדרה, תצוגת הכשל היא "Err09" | |||||||
| PA | הגנה מפני תת-מתח | (100-140)% | 120% | גבוה יותר מערך ההגדרה, תצוגת הכשל היא "Err10" | |||||||
| PB | שיטת התחלה | 0-5 | 1 | 0 מוגבל זרם, 1 מתח, 2 מוגבל זרם בעיטה, 3 מוגבל זרם בעיטה, 4 שיפוע זרם, 5 סוג לולאה כפולה | |||||||
| PC | הגנת פלט מאפשרת | 0-4 | 4 | 0 ראשוני, 1 עומס מינימלי, 2 סטנדרטי, 3 עומס כבד, 4 בכיר | |||||||
| PD | מצב בקרה תפעולי | 0-7 | 1 | השתמש ב- לבחירת הגדרות לוח בקרה חיצוני. 0, להפעלת לוח בקרה בלבד, 1 להפעלת לוח בקרה חיצוני וגם להפעלת מסוף בקרה חיצוני. | |||||||
| PE | אפשרות אתחול אוטומטי | 0-13 | 0 | 0: אסור, 1-9 לזמני איפוס אוטומטי | |||||||
| PF | תיקון פרמטרים מאפשר | 0-2 | 1 | 0: אסור, 1 עבור נתונים חלקיים מתוקנים המותרים, 2 עבור כל הנתונים המתוקנים המותרים | |||||||
| PH | כתובת תקשורת | 0-63 | 0 | שימוש לתקשורת של מתנע רך מרובה והתקן עליון | |||||||
| PJ | פלט התוכנית | 0-19 | 7 | השתמש כדי לתכנת את הגדרת פלט הממסר (3-4). | |||||||
| PL | זרם עצירה רך מוגבל | (20-100)% | 80% | השתמש בהגדרה מוגבלת זרם של עצירה רכה P2 | |||||||
| PP | זרם מנוע מדורג | (11-1200)א | ערך מדורג | משמש להזנת זרם נומינלי של המנוע | |||||||
| PU | הגנה מפני תת-מתח מנוע | (10-90)% | לֶאֱסוֹר | משמש להגדרת פונקציות הגנה מפני תת-מתח מנוע. | |||||||
הוראת כשל
| קוד | הוֹרָאָה | בעיה ופתרון | |||||||||
| שגיאה00 | אין כישלון | תקלה של תת-מתח, מתח יתר, התחממות יתר או עצירה חולפת פתוחה במסוף תוקנה. ומחוון הלוח נדלק, לחץ על כפתור "עצור" כדי לאפס, ולאחר מכן מפעיל את המנוע. | |||||||||
| שגיאה01 | מסוף עצירה זמני חיצוני פתוח | בדוק אם יש קצר חשמלי במסוף 7 של הטרמינל המעבר החיצוני 7 והמסוף המשותף 10 או אם מגע NC של התקני הגנה אחרים תקין. | |||||||||
| שגיאה02 | התחממות יתר של מתנע רך | טמפרטורת הרדיאטור עולה על 85 מעלות צלזיוס, הגנה מפני התחממות יתר, מתנע רך מפעיל את המנוע לעתים קרובות מדי או שהספק המנוע אינו רלוונטי למתנע רך. | |||||||||
| שגיאה03 | התחלת הארכה | נתוני הגדרת ההתחלה אינם רלוונטיים או שהעומס כבד מדי, קיבולת החשמל קטנה מדי | |||||||||
| שגיאה04 | אובדן פאזה בקלט | בדוק אם יש תקלה בלולאה הראשית או בקלט, או אם מגען העוקף יכול להישבר וליצור מעגל תקין, או אם בקרת הסיליקון פתוחה | |||||||||
| שגיאה05 | אובדן פאזה ביציאה | בדוק אם יש תקלה בלולאה הקלט או בלולאה הראשית, או אם המגען המעקף יכול להישבר וליצור מעגל תקין, או אם בקרת הסיליקון פתוחה, או אם יש תקלות בחיבור המנוע. | |||||||||
| שגיאה06 | תלת פאזי לא מאוזן | בדוק אם יש שגיאות בקלט החשמל התלת-פאזי ובמנוע, או אם שנאי הזרם נותן אותות. | |||||||||
| שגיאה07 | זרם יתר מתחיל | אם העומס כבד מדי או שניתן להשתמש בהספק המנוע באמצעות מתנע רך, או הגדרת ערך PC (הגנת פלט מותרת). | |||||||||
| שגיאה08 | הגנה על עומס יתר תפעולי | אם העומס כבד מדי או P7, הגדרת PP משתבשת. | |||||||||
| שגיאה09 | תת-מתח | בדוק אם מתח קלט או תאריך הגדרת P9 הם שגיאות | |||||||||
| שגיאה 10 | מתח יתר | בדוק אם מתח קלט או תאריך הגדרת PA שגויים | |||||||||
| שגיאה11 | שגיאת נתוני הגדרת | תקן את ההגדרה או לחץ על כפתור "Enter" כדי להתחיל באיפוס | |||||||||
| שגיאה12 | קצר חשמלי של עומס | בדוק אם יש קצר חשמלי בסיליקון, או שהעומס כבד מדי, או שסליל המנוע יש קצר חשמלי. | |||||||||
| שגיאה13 | שגיאת חיבור מחדש | בדוק אם טרמינל ההתנעה החיצוני 9 והטרמינל העצירה 8 מחוברים בהתאם לסוג דו-קו. | |||||||||
| שגיאה14 | שגיאת חיבור מסוף עצירה חיצוני | כאשר הגדרת PD היא 1, 2, 3, 4 (מאפשרת בקרה חיצונית), טרמינל עצירה חיצוני 8 והטרמינל משותף 10 אינם קצרים. רק אם הם קצרים, ניתן להפעיל את המנוע. | |||||||||
| שגיאה15 | עומס יתר על המנוע | בדוק את שגיאת המנוע והעומס. | |||||||||
מספר דגם
מסוף בקרה חיצוני
הגדרת מסוף בקרה חיצוני
| ערך החלפה | קוד הטרמינל | פונקציית טרמינל | הוֹרָאָה | |||||||
| פלט ממסר | 1 | פלט מעקף | מגען מעקף בקרה, כאשר המתנע הרך מתחיל בהצלחה, אין מגע ללא אספקת חשמל, קיבולת: AC250V/5A | |||||||
| 2 | ||||||||||
| 3 | פלט ממסר ניתן לתכנות | סוג הפלט והפונקציות נקבעים על ידי P4 ו-PJ, אין מגע ללא ספק כוח, קיבולת: AC250V/5A | ||||||||
| 4 | ||||||||||
| 5 | פלט ממסר כשל | כאשר מתנע רך מתקלקל, ממסר זה סגור, אין מגע ללא אספקת חשמל, קיבולת: AC250V/5A | ||||||||
| 6 | ||||||||||
| קֶלֶט | 7 | עצירה חולפת | כאשר המתנע הרך מתחיל כרגיל, יש לקצר את ההדק הזה עם ההדק 10. | |||||||
| 8 | עצירה/איפוס | מתחבר עם טרמינל 10 כדי לשלוט ב-2 קווים, 3 קווים, לפי שיטת החיבור. | ||||||||
| 9 | הַתחָלָה | |||||||||
| 10 | מסוף משותף | |||||||||
| פלט אנלוגי | 11 | נקודה משותפת של סימולציה (-) | זרם יציאה של 4 פעמים הזרם המדורג הוא 20mA, ניתן לזהות אותו גם על ידי מד DC חיצוני, התנגדות עומס מקסימלית היא 300. | |||||||
| 12 | פלט זרם סימולציה (+) | |||||||||
לוח תצוגה
| מַד | הוֹרָאָה | ||||||||
| מוּכָן | כאשר המכשיר דולק ומצב מוכן, מחוון זה דולק | ||||||||
| לַעֲבוֹר | כאשר מעקף פועל, מחוון זה דולק | ||||||||
| שְׁגִיאָה | כאשר מתרחשת כשל, מחוון זה דולק | ||||||||
| A | נתוני ההגדרה הם הערך הנוכחי, מחוון זה דולק | ||||||||
| % | נתוני ההגדרה הם האחוז הנוכחי, מחוון זה דולק | ||||||||
| s | נתוני הגדרת זמן, מחוון זה דולק | ||||||||
הוראת מחוון מצב
הוראות כפתור
למתחר הרך סדרת RDJR6 יש 5 סוגים של מצבי פעולה: מוכן, פעולה, תקלה, התחלה ועצירה, מוכן, פעולה, תקלה
יש אות מחוון יחסי. הוראות ראו טבלה לעיל.
בתהליכי התחלה רכה ועצירה רכה, לא ניתן להגדיר נתונים, רק אם הם נמצאים במצב אחר.
במצב הגדרה, מצב ההגדרה יפסיק את מצב ההגדרה ללא כל פעולה לאחר 2 דקות.
תחילה לחצו על כפתור "Enter", לאחר מכן טענו והפעילו את המתנע. לאחר האזנה לצליל ההתראה, ניתן לאפס את
ערך המפעל של נתונים בחזרה.
מראה ומידות הרכבה
תרשים יישום
דיאגרמת בקרה רגילה
הוֹרָאָה:
1. מסוף חיצוני מאמץ שני קווי בקרת סוג. כאשר KA1 סגור להפעלה, פתוח לעצירה.
2. מתנע רך אשר מעל 75 קילוואט צריך לשלוט בסליל המגעון המעקף באמצעות ממסר אמצעי, בגלל קיבולת הנעה מוגבלת של מגע הממסר הפנימי של המתנע הרך.
12.2 דיאגרמת בקרה משותפת אחת ודיאגרמת בקרה המתנה אחת
12.3 דיאגרמת בקרה משותפת אחת ודיאגרמת בקרה המתנה אחת
הוֹרָאָה:
1. בתרשים, מסוף חיצוני מאמץ סוג דו-קוי
(כאשר 1KA1 או 2KA1 סגורים, הם מתחילים לפעול. כאשר הם נשברים, הם מפסיקים לפעול.)
2. מתנע רך מעל 75 קילוואט צריך לשלוט בסליל המגעון מעקף באמצעות ממסר אמצעי בגלל קיבולת הנעה מוגבלת של מגע הממסר האמצעי הפנימי של המתנע הרך.